Queremos proyectar un controlador de velocidad para automóviles que puede ser modelado mediante el diagrama de bloques siguiente:
El objetivo es obtener un controlador de velocidad preciso. Asumiremos que el control es preciso si la velocidad se encuentra en el 2% del valor deseado en un tiempo de 1,6s.
a) Utilice el lugar geométrico de las ra&iaute;ces para determinar el punto en que el sistema tiene el comportamiento deseado y calcule la ganancia
K de este punto.
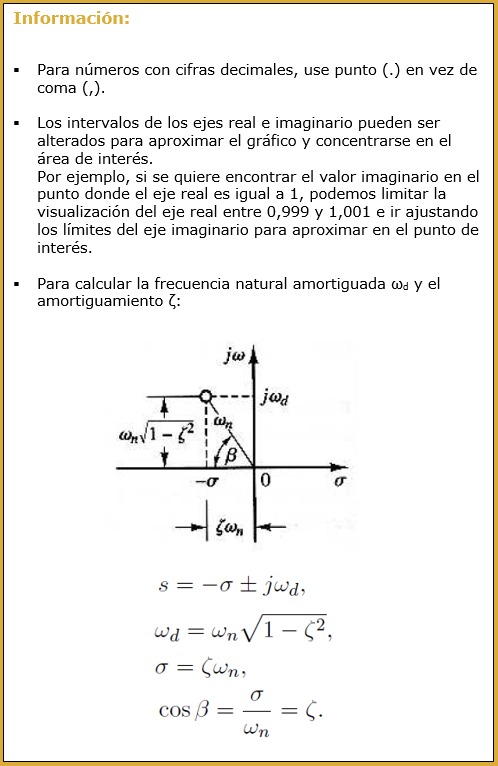
b) Calcule la frecuencia natural amortiguada
\omega_{d}.
c) Calcule el amortiguamiento
\zeta.
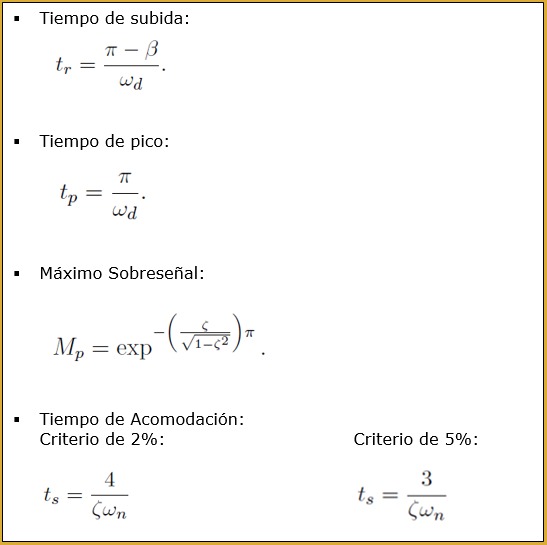
d) Calcule el máximo sobreseñal
M_{p} .