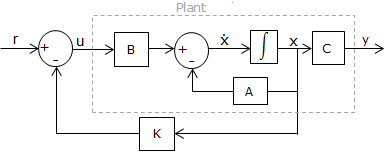
The state feedback is a method of controlling the system by multiplying the state vector by a vector of gains and adding to the input. This substitutes for the output feedback and allows the poles to be placed in chosen positions of the complex plane and change the system dynamic behavior.
The block diagram that follows shows the original plant and the state feedback connection.
Given the system parameters:
The state variable model of the system with no feedback is:
The initial values of the poles are those of the eigenvalues of matrix A.
If pair (A, B) is controllable, the eigenvalues can arbitrarily be placed by the use of the state feedback.
The system is controllable if the rank of the controllability matrix U=\left [ \: B\: |\: AB\: \right ] is n, thus 2.
The main objective is to relocate the pole that is on the right hand side of the complex plane, but other poles may be reassigned as well.
After the controllability is checked, the gains may be computed so that the poles have the assigned values:
And then using Ackermann’s expression, the gains are computed.
Finally, the gain vector can be applied to the original for the model with the state feedback is determined. The original system model is:
\dot{x}=Ax+Bu
y=Cx
The model of the controlled model is:
\dot{x}=\left ( A-Bk \right )x+Bu
y=Cx
As a next step, the new poles of the system can be verified.
|
