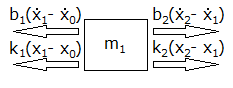
Fazendo o diagrama de corpo livre de cada massa do sistema, podemos simplificar o equacionamento.
Primeiramente em
m_1:
m_1 \ddot{x_1} = b_2(\dot{x_2} - \dot{x_1}) + k_2(x_2 - x_1) - b_1(\dot{x_1} - \dot{x_0})-k_1(x_2 -x_1)
\ddot{x_1} = \frac{1}{m_1}[-(k_1 + k_2)x_1 - (b_1 + b_2)\dot{x_1} + k_2 x_2 + b_2 \dot{x_2} + k_1 x_0 + b_1 \dot{x_0})
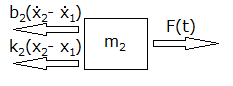
Agora para
m_2:
m_2 \ddot{x_2} = F - k_2(x_2 - x_1) - b_2(\dot{x_2} - \dot{x_1})
\ddot{x_2} = \frac{1}{m_2}[k_2 x_1 + b_2 \dot{x_1} - k_2 x_2 - b_2 \dot{x_2} + F
Escolhendo as variáreis de estado como:
\begin{bmatrix}
x_1 \\
\dot{x_1} \\
x_2\\
\dot{x_2}
\end{bmatrix} = \begin{bmatrix}
x_1\\
v_1\\
x_2\\
v_2
\end{bmatrix} , e sabendo que
\begin{bmatrix}
\dot{x_1} \\
\ddot{x_1} \\
\dot{x_2}\\
\ddot{x_2}
\end{bmatrix} = \begin{bmatrix}
\dot{x_1} \\
\dot{v_1} \\
\dot{x_2}\\
\dot{v_2}
\end{bmatrix} e
\begin{bmatrix}
F \\
x_0 \\
\dot{x_0}
\end{bmatrix} = \begin{bmatrix}
F \\
x_0 \\
v_0
\end{bmatrix}
Por fim, passando-se para a forma de espaço-estado, escolhendo as saídas a serem observadas sendo as próprias variáveis:
\begin{bmatrix}
\dot{x_1} \\
\dot{v_1} \\
\dot{x_2}\\
\dot{v_2}
\end{bmatrix} = \begin{bmatrix}
0 & 1 & 0 & 0 \\
-\frac{k_1 + k_2}{m_1} & -\frac{b_1 + b_2}{m_1} & \frac{k_2}{m_1} & \frac{b_2}{m_1} \\
0 & 0 & 0 & 1\\
\frac{k_2}{m_2}& \frac{b_2}{m_2} & -\frac{k_2}{m_2} & - \frac{k_2}{m_2}
\end{bmatrix} \begin{bmatrix}
x_1\\
v_1\\
x_2\\
v_2
\end{bmatrix} + \begin{bmatrix}
0 & 0 & 0 \\
0 & \frac{k_1}{m_1} & \frac{b_1}{_1} \\
0 & 0 & 0 \\
1 & 0 & 0
\end{bmatrix}
\begin{bmatrix}
F \\
x_0 \\
v_0
\end{bmatrix}
\underset{y}{\rightarrow} ~
= \begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix} \begin{bmatrix}
x_1\\
v_1\\
x_2\\
v_2
\end{bmatrix}
Observando esse espaço-estado, percebemos que a complexidade do sistema é diretamente proporcional aos graus de liberdade do mesmo, que se justifica pela quantidade de variáveis de estado que possui.
As respostas no tempo serão analisadas nas variáveis
x1(t) e
x2(t), que são os posicionamentos das massas em relação à referência, e
v1(t) e
v2(t) que são as velocidades das massas.
Parâmetros do sistema: