The use of state feedback is another way of controlling the system. State feedback is a technique in which the state variables are used to feedback – gains are used to weight each one. State feedback allows the poles of the model to be assigned.
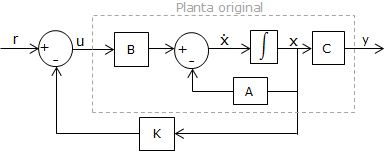
The block diagram shows the model of the system and its feedback block.
Once the parameters are known, the state space model of the system may be computed:
The system instability may be observed by the poles of the open loop transfer function. The poles are the eigenvalues of matrix A of the state space model.
Using the state variable feedback and under the condition of the pair (A,B) being controllable, it is possible to assign arbitrary values to the eigenvalues of the closed loop system.
Once the controllability is checked, the new values for the poles can be assigned and the values of the elements of the gain vector, K, can be computed by using the Ackermann formula.
The main objective is to relocate the pole that is on the right hand side of the complex plane, but other poles may be reassigned as well.
Finally, the gain vector can be set to compute the new state variable model. The original model is:
x=A.x+B.u
y=C.x
The system with the state feedback is:
x=(A-B.K).x + B . u
y=C.x
The new values of the poles can be computed from the eigenvalues of matrix (A-B.K):
If no poles of the closed loop system are on the right hand side of the complex plane, the system is stable.
|
