|
The PID Controller
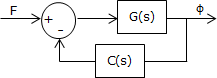
The PID Controller has three components: the proportional part, K_{P}, the integral part, K_{I}, and the derivative part, K_{D}. Its transfer function is:
G\left ( s \right )=K_{P}+\frac{K_{I}}{s}+s\cdot K_{D}
Each part has a different role in the control action:
K_{P} - reduces the rise time and the error with respect to the reference (though it does not eliminate it); it increases the overshoot .
K_{I} - eliminates the error with respect to the reference, but changes the transient behavior; the settling time and the overshoot are increased.
K_{D} - makes the system more stable and reduces the overshoot and the settling time.
|