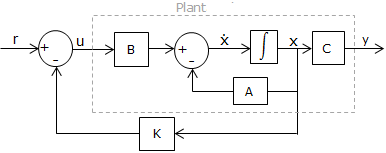
Outra forma de controlar o sistema é através da realimentação de estados, que consiste em realimentar todos os estados do sistema, multiplicados por uma matriz de ganhos K em vez de usar a saída do sistema como realimentação. Isto permite reposicionar os polos do sistema para alterar suas características.
A imagem a seguir representa o diagrama de blocos da planta original com o controle por realimentação de estados.
Como visto anteriormente, dados os parâmetros do sistema do motor DC:
O modelo do sistema sem realimentação por variáveis de estado é :
Os valores iniciais dos polos são os dos autovalores da matriz A.
Através da realimentação, é possível obter um novo sistema em que os polos de malha fechada podem ser reposicionados arbitrariamente se o par (A, B) for controlável.
O sistema é controlável se a matriz de controlabilidade U=\left [ \: B\: |\: AB\: \right ] tiver posto n, no caso 2.
Após verificar a controlabilidade, os ganhos podem ser calculados para localizar os polos nas posições desejadas no Plano Complexo.
E então, através da fórmula de Ackerman, calcular o valor de K, que realiza o ajuste necessário:
Finalmente, podemos aplicar o ganho K na malha de realimentação e chegar ao sistema controlado. O sistema original era da forma:
\dot{x}=Ax+Bu
y=Cx
O sistema controlado será da forma:
\dot{x}=\left ( A-Bk \right )x+Bu
y=Cx
Então, podemos verificar a nova posição dos polos do sistema realimentado através dos autovalores de (A-B.k):
|