O sistema já é estável, mas ainda assim, pode-se usar um controlador PID para ajustar as características como o tempo que o sistema demora a entrar em regime permanente e o Overshoot.
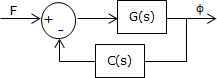
O que se deseja fazer é adicionar um controlador
C\left ( s \right ) na malha de realimentação, então o novo sistema seria:
Para mais detalhes sobre o controlador PID, clique na lupinha.

Podemos, então, tentar encontrar valores de
K_{P},
K_{I} e
K_{D} que deixam o sistema com as características desejadas. É possível analisar o efeito do controlador no sistema através da resposta ao degrau.