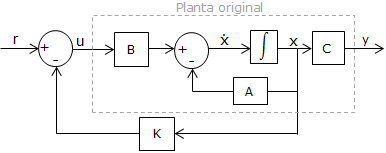
Outra forma de controlar o sistema é através da realimentação de estados, que consiste em realimentar todos os estados do sistema, multiplicados por uma matriz de ganhos K em vez de usar a saída do sistema como realimentação. Isto permite reposicionar os polos do sistema para torná-lo estável.
A imagem a seguir representa o diagrama de blocos da planta original com o controle por realimentação de estados.
Dados os parâmetros do sistema, o modelo por variáveis de estado pode ser computado:
A instabilidade do sistema pode ser verificada através dos polos de malha aberta, que são os autovalores da matriz A. Se o sistema possuir polos no SPAD, ele é instável.
Através da realimentação, é possível obter um novo sistema em que os polos de malha fechada podem ser reposicionados arbitrariamente se o par (A, B) for controlável.
Após verificar a controlabilidade, podemos então determinar a nova posição desejada para os polos e, através da fórmula de Ackerman, calcular o valor de K que realiza o ajuste necessário.
O objetivo principal para atingir a estabilidade é reposicionar o polo que está no SPAD, mas os outros polos também podem ser ajustados.
Finalmente, podemos aplicar o ganho K na malha de realimentação e chegar ao sistema controlado. O sistema original era da forma:
x=A.x+B.u
y=C.x
O sistema controlado será da forma:
x=(A-B.K).x + B . u
y=C.x
Então, podemos verificar a nova posição dos polos do Sistema realimentado através dos autovalores de (A-B.K):
Se o sistema não tiver mais polos no SPAD após a aplicação dos ganhos, então ele terá se tornado estável.
|