|
Ajustar o sistema a partir do Método do Lugar das Raízes
Para o tempo de acomodação t_{s} (critério de 2%)
t_{s} = 0.5s ~ \rightarrow ~ t_{s} = \frac{4}{\sigma} ~ \rightarrow ~ \sigma = \frac{4}{0.5} ~ \rightarrow ~ \sigma = 8
Essas informações estão contidas no lugar das raízes da seguinte forma:
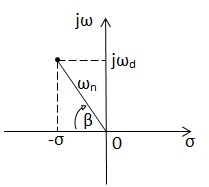 s = - \sigma \pm j \omega_{d}
\omega_{d} = \omega_{n} \sqrt{1-\zeta^2}
\sigma = \zeta ~ \omega_{n}
cos \beta = \zeta
s = - \sigma \pm j \omega_{d}
\omega_{d} = \omega_{n} \sqrt{1-\zeta^2}
\sigma = \zeta ~ \omega_{n}
cos \beta = \zeta
Então, através do lugar das raízes, buscamos um ponto em que \sigma = -8
Logo, se existir um ponto que a parte real é igual a -0,8 (aproxime a visualização do lugar das raízes em torno da região de interesse para encontrar um valor mais preciso para o ponto), e sabendo que todos os pontos do lugar das raízes obedecem à equação:
1 + K. G(s)C(s) = 0
Podemos calcular o ganho K associado a este ponto e ainda outras características do sistema.
|