|
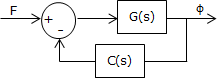
Controlador PID
O controlador PID é composto por três componentes:(1) Um termo proporcional K_{P},(2) um integral K_{I} e (3) um derivativo K_{D}.
Sua função de transferência tem, então, a seguinte forma:
G\left ( s \right )=K_{P}+\frac{K_{I}}{s}+s\cdot K_{D}
Cada um dos termos causa diferentes efeitos no sistema:
K_{P} - Reduz o tempo de subida, também reduz o erro com a referência (porém sem nunca eliminá-lo) e aumenta o Overshoot.
K_{I} - Tem a capacidade de eliminar o erro com a referência, porém, a resposta transiente será afetada. O tempo de assentamento e o overshoot aumentam.
K_{D} - Aumenta a estabilidade do sistema, reduzindo o overshoot e o tempo de assentamento.
|