Queremos projetar um controlador de velocidade para automóveis que pode ser modelado pelo diagrama de blocos a seguir:
O objetivo é obter um controlador de velocidade preciso. Assumiremos que o controle é preciso se a velocidade fica entre 2% do valor desejado em um tempo de 1.6s.
a) Utilize o lugar das raízes para determinar o ponto em que o sistema tem o comportamento desejado e calcule o ganho K deste ponto.
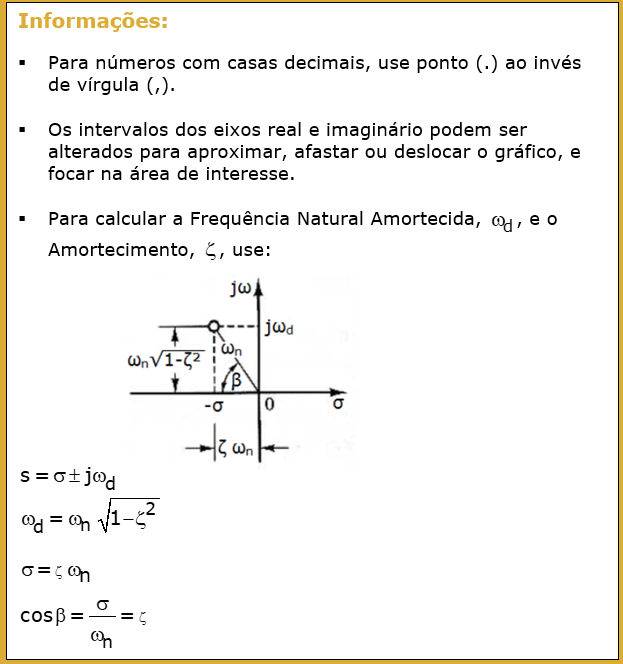
b) Calcule a frequência natural amortecida ω
d.
c) Calcule o amortecimento ζ.
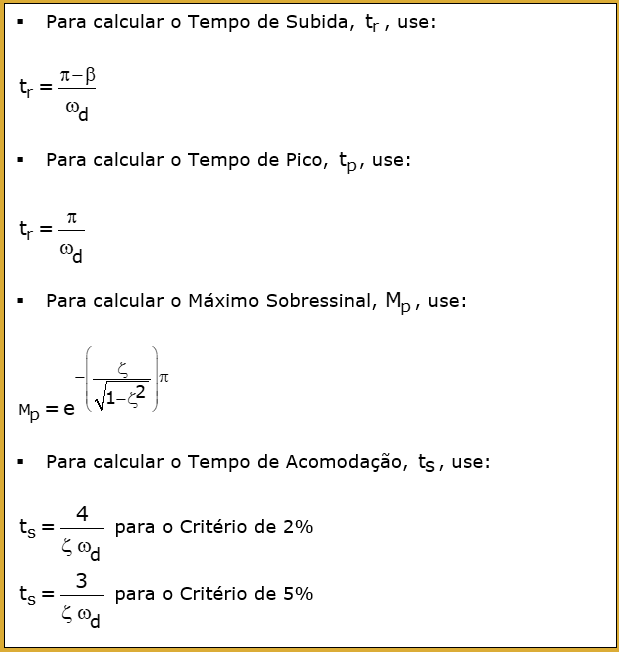
d) Calcule o máximo sobressinal Mp.